
First you need to acquire The RealSense Tracking Camera T265 from Intel which offers visual simultaneous localization and mapping (V-SLAM) for robotics, drone and augmented reality rapid prototyping uses.This compact camera features two fisheye lens sensors, an IMU, an Intel Movidius Myriad 2 VPU, and cross-platform, developer-friendly performance.


The T265's V-SLAM algorithms run directly on the VPU, resulting in minimal latency and extremely low power consumption. The T265 provides under 1% closed loop drift (under intended use conditions). It also produces <6ms latency between movement and reflection of movement in the pose, a response quick enough for highly sensitive applications such as augmented and virtual reality.
The T265 camera offers a plug-and-play USB connection which enables you to quickly start streaming pose data. Use the T265 camera by itself or pair it with a D400 series depth camera for occupancy mapping or collision avoidance and navigation in locations where GPS data is not available. The T265 camera incorporates an infrared cut filter which enables it to ignore the projected patterns from a D400 depth camera. The T265 also features standardized mounting sockets on the rear of the camera.
Simple Integration
The self-contained T265 offers a plug-and-play USB solution for streaming pose data for robot, drone, augmented reality, and virtual reality usage.
Precision Tracking
Performance tests yielded under 1% closed loop drift under intended use conditions
Dual Fisheye Lenses
Combined 163°, ±5°, near-hemispherical field of view produces robust tracking, even at fast speeds
Low Power
Compact Lightweight
Standalone/Combined Use
Proprietary V-SLAM algorithms run directly on the camera, enabling it to operate at only 1.5W
The T265 measures 4.3 x 1 x 0.5" and weighs just under 2 oz
Use alone or with a D400 series depth camera; an infrared cut filter enables the T265 to ignore projected patterns from a paired depth camera
WHAT YOU NEED TO START REtracking
$ 199
REtracker
ReTracker is a Complete tracking solution for Virtual Reality and Augmented Reality production. Features include, genlock, world pose, zero-jitter, kalman filtering, and much more. It works in an unlimited space, outdoors and indoors.


We used the the RealSense Tracking Camera T265 from Intel to create our own REtracker software. The software is renderer Technology-agnostic, meaning it works with all engines as we are unbiased towards the use of any specific technology to support your project. You just need to purchase the sensor yourself from Intel website and you are ready to Go.
Why REtracker is Better


REtracker
CALIBRATOR
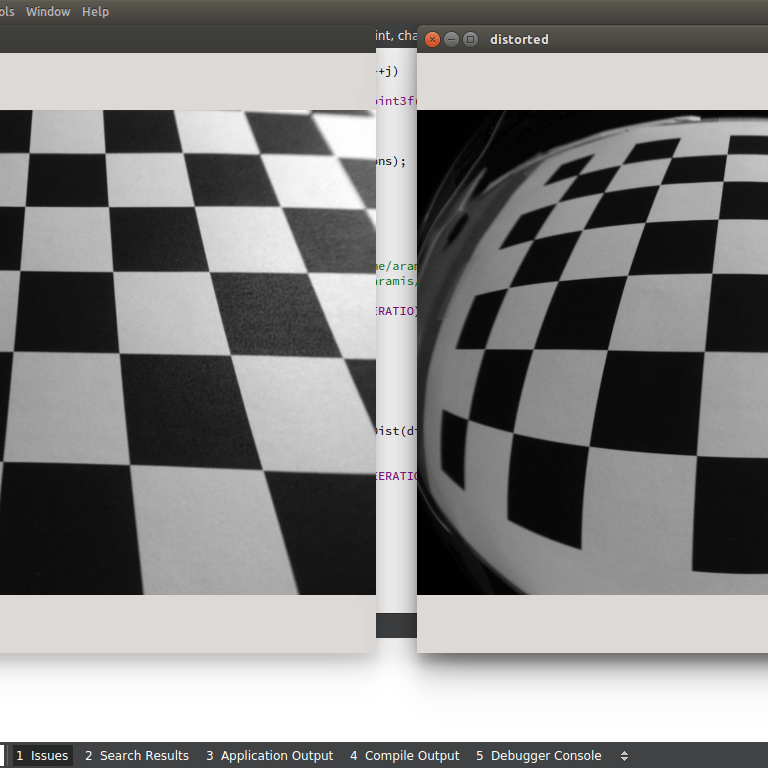
High precision lens calibration software, is essential to match the virtual camera with the real camera for perfect tracking. The software generates the camera matrix in addition to the lens distortion parameters, Field of View (FOV) and Normalized Focal Length


One-on-One remote support and training via zoom and teamviewer.
we guarantee you will be up and running since the first two hours of training
We only sell 10 licenses a month in order to provide effective training
NEW: Local Support in China and Vietnam


1- full studio tracking (3 Sensors, 3 cameras)
2- Lens calibration software that generates the FOV and lens distortion parameters
3- Genlock (our bespoke system locks the tracking to the output signal for a silky smooth blend of the graphics and the camera feed)
4- World pose software to detect camera height and position in real world
5- Aximmetry tools for AR, VR and XR
6- Lens encoder tools for zoom and focus
7- Livelink version (UE 4.27) for native unreal support
8- One on one tutorial on zoom and teamviewer
9- FreeD version for Unreal or other engines
10- Lifetime license.
REtracker Broadcast Features: (1,450 Euro)
You can track 3 cameras simultaneously with "ANY" Aximmetry license on a single PC (Community, Studio, Professional and Broadcast)
Preparation for zoom tutorial
1- Print Calibration Board on 1 to 1 Scale and Tape it to a firm Board
2- Bring a Meter or a Measuring Tape or a Laser Meter
3- Print the Apriltag number 1 as big as you can (on A2 paper)
4- Be Sure to Have a Video Signal inside Aximmetry
5- Should Have Good internet Connection
6- 3D Print the case for the Realsense and Fix it on the Camera
7- Set a Chroma Area Well lit
8- Temporary Separate Lighting for Lens Calibration
9- Download TeamViewer
10- One-on-one can be conducted in English, French and Arabic


For REtracker Software (Tracking using the RealSense T265) you can download a demo from Our github.


The process goes as follows:
*Calibrate zoom out max and save the json file
*Calibrate zoom in max and save json file
*Map your zoom lens using Lonet software.
*Enable OSC output to port 7000
*Use the new REtrackerZoomLens compound in Aximmetry
*Load the two calibrated json files
*Connect the new compound to lens distort input
*Zoom out max with the camera and trigger “set zoom out max”
*Zoom in max with the camera and trigger “set zoom in max”
ZOOM encoding with Lonet:
Works with Unreal (4.26 and 4.27) natively.
using our Live Link version
NEW: FreeD Version
In addition we are about to release a Livelink version very soon
We uploaded an Aximmetry sample project on our github https://github.com/mrassi/REtrackerDEMO
and two compounds:
1 - tracking data receiver
2- lens distortion compound

